人とロボットの架け橋になる。
Tether Following Sensor
テザー・フォロイング・センサ(TFS) CoRoCo-S100・SmaCoのコア技術
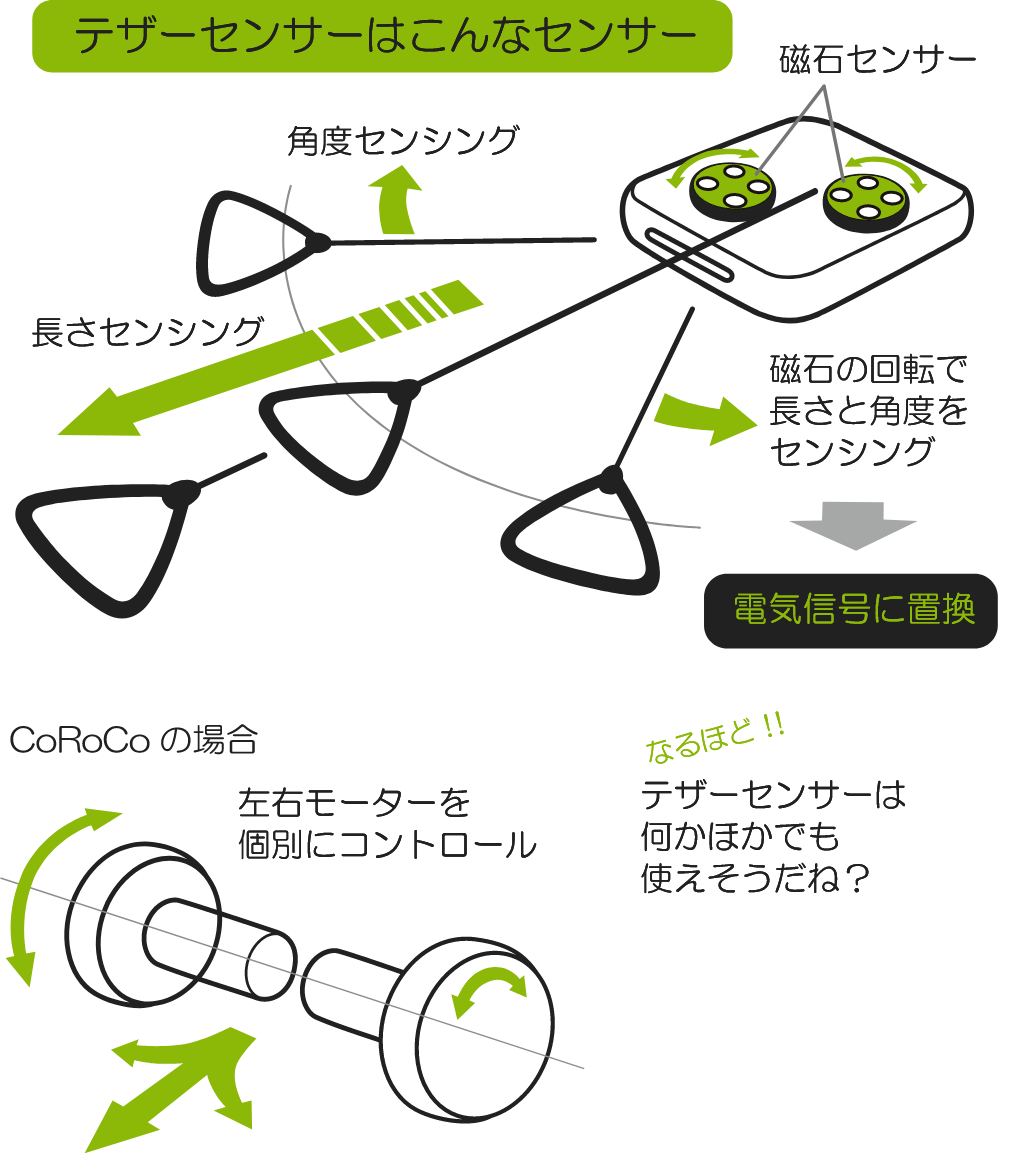
テザー・フォロイング・センサ(TFS)は、運搬特化型の協働ロボットCoRoCo-S100、SmaCoのテザー操作のコア技術として使用しているセンシング技術です。
テザーというワイヤーを巻き取る仕組みになっており、取り出したワイヤーの回転数などから長さや角度、加速度を検知します。その検知情報をもとに、運搬ロボットの走行・停車を判断し、走行方向・スピードを演算してモータを制御しています。
その駆動制御には絶妙な調整を施しており、ロボットがオペレータの動きに合わせて「走る・曲がる・止まる」をおこない、まるでひとについていっているような動きを可能に。
感覚的なひとの動きに追従する運搬ロボットを実現しています。
テザー・フォロイング・センサ(TFS)と駆動制御の仕組み
-
STEP1テザーの長さ・角度・加速度を検知
-
STEP2走行すべき方向・速さを演算
走行 or 停車を判断 -
STEP3モータを制御・走行
FEATURE特徴
“物理的に”ひととつながり、安心・安全・癒し・活力をつくり出す
ひとと共存・共創するTFSの技術力
人協調型ロボティクスの社会実装における
“先進技術に対するひとの心理ハードル”
最先端の技術・ロボットテクノロジーが発展する中で、人協調型ロボティクスの社会実装にはいまだ高いハードルがあると課題認識しています。
その大きな要因のひとつが、“使う人の心理的ハードル”です。
具体的には、ロボットの使い方や技術が理解できないことから生じる抵抗感、怖い・事故に繋がりそうという不安感などの心理・感情がそれにあたります。
使う側の人間が技術の発展についていけるか?それが社会実装における課題のひとつになると、私たちが現在農業の生産現場でおこなっている実証研究で、検証されつつあるファクトです。
人協調型ロボティクスの社会実装における
ひとの心理的ハードル
- ちゃんと
扱えるか
自信がない - ロボットに
慣れない - 扱うのが怖い
事故に
繋がりそう
- 期待通りに
機能するか
不安 - 導入コストが
高い
テザー・フォロイング・センサ(TFS)
使う人のマインドセットを支援し、
人協調型ロボティクスの心理的負荷を解消
使うひとの不安感を安心感に、不信感から信用へ、
マインドセットを支援。
大事なのは“ひととロボットの橋渡し”をすること。
人の心理的ハードルを取り除くためには、ロボット化や自動化を受け入れる気持ち・心の醸成といった人間へのアプローチが必要不可欠であると考えます。
そこで私たちは、完全な自動化ではなく、あえて”物理的に”人とつながるTFSの技術で人とロボットの橋渡しをすることで、使う人の不安感を安心感に、不信感から信用する気持ちにマインドセットの支援をする立場を取り、人とロボットが安心して共存・共創する社会を実現します。
人協調型ロボティクスの社会実装において
求められる技術の提供を実現
- シンプル・
感覚的な
使用感 - 人が操作する
安心感 - 高い安全性
高品質
- 人の動きに
連動する機能 - コストの
低減
【安心】テザーで物理的につながる
テザーで繋がっていて「ちゃんとついてくる」という安心感、親しみ
【信用】ISO13482 認証取得※1
操作が簡単・コスト低減・故障が少ない
※1 CoRoCo-S100で取得。
SPEC基本仕様
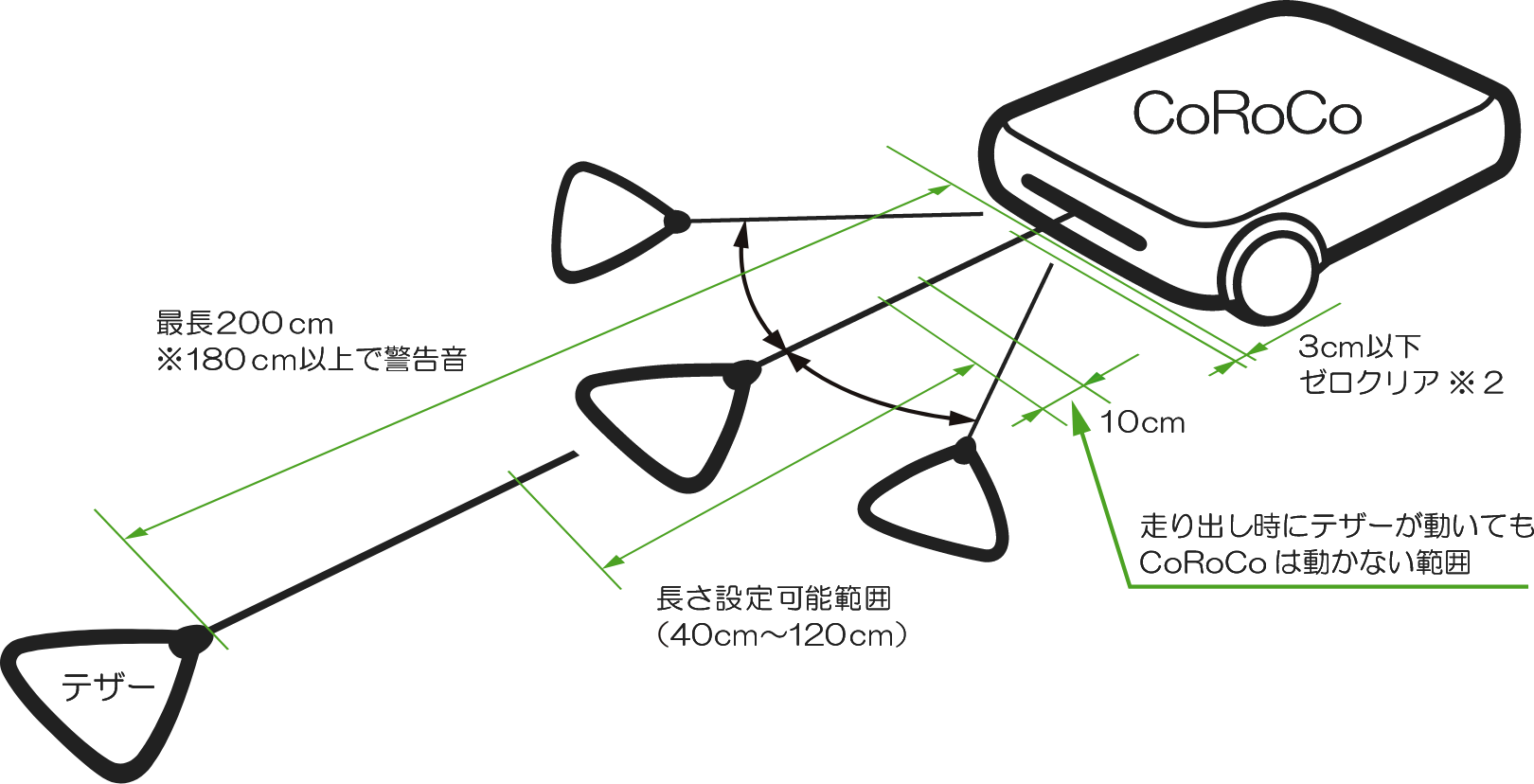
TFSの仕様(CoRoCoの仕様ベース)
- テザーの長さ:40cm~120cmの範囲で約2秒停止した長さを設定
- テザーが3cm以下になると長さ設定はゼロクリア※2
※2 200ms間で3cm以下の変化がない場合にゼロクリアされます。
- 寸法
- W23.5 × D18 × H8(cm)
- 重量
- 約1,400g
- テザーの長さ
- (MAX)200cm
(設定可能範囲)40〜120cm - 通信方法
- CAN通信
“モノを運ぶ”を少しだけ支援し、
日常をより心地よく、より速く、より楽しくする

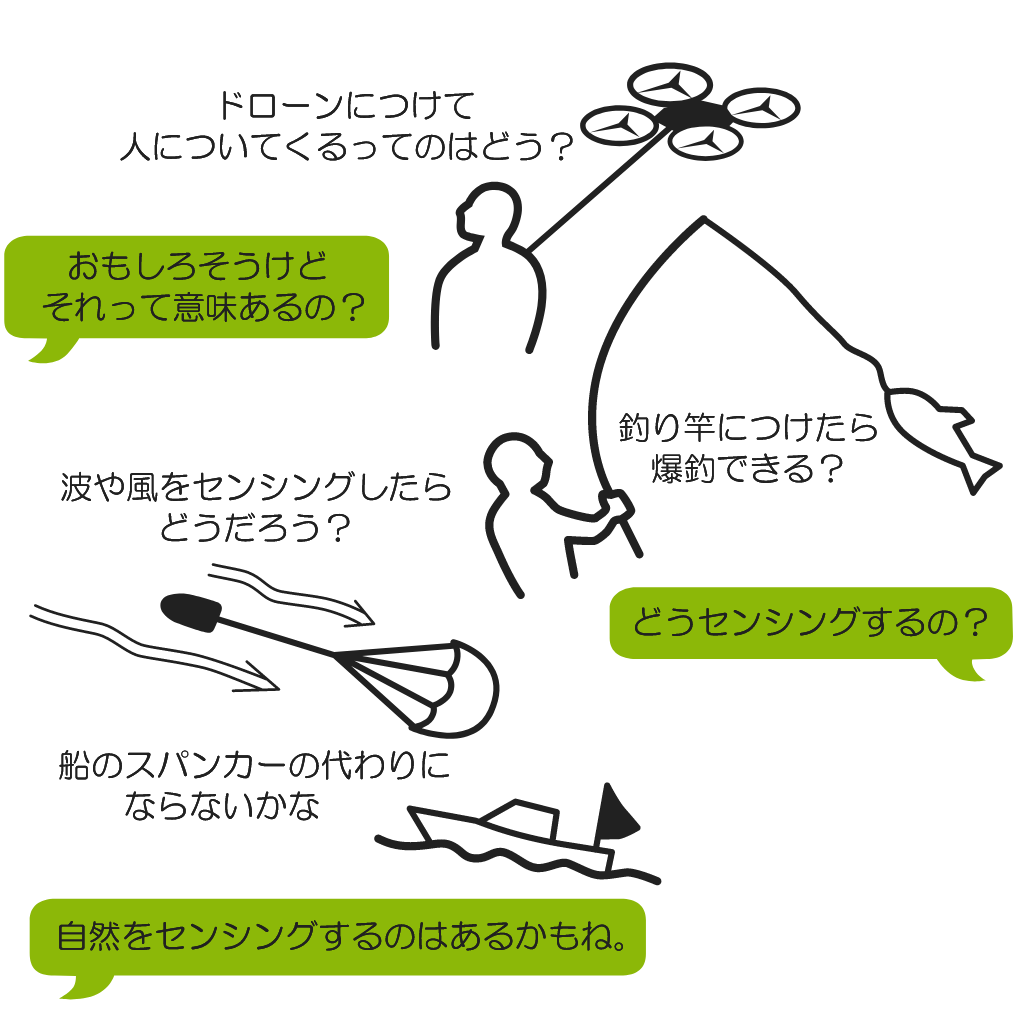
CASE導入イメージ・事例
世の中が必要としているさまざまな領域で、
皆さまが取り組まれているさまざまな先進技術の支え・ひととのつなぎになる存在。
先導するのは行先を制御できればひとでもロボットでも良い。
まさに橋渡し・つなぎの存在を目指します。
PARTNERパートナー募集
TBグローバルテクノロジーズは、テザーでつながるパートナー様を募集中です。
テザーをつかった新たなイノベーション、共創しませんか?